Im Park habe ich manchmal Leute beobachtet die mit einem ferngesteuerten Auto durch die Gegend gezogen sind. So etwas wollte ich auch immer mal machen, aber einfach ein solches Auto zu kaufen fand ich ein bisschen zu langweilig. Deswegen habe ich mir ein paar Teile gekauft und daraus ist dann ein kleines Roboterfahrzeug entstanden. Im Folgenden gibt es einen kurzen Erfahrungsbericht dazu.
Gestartet habe ich damit zu lernen, wie man einen Motor ansteuert. Dazu habe ich zuerst mit einem Raspberry Pi experimentiert und mit dem Pi einen kleinen Motor zum Laufen gebracht. Für die Ansteuerung des Motors hatte ich mir selbst eine H-Brücke zusammengelötet. Allerdings kann ich nicht wirklich gut löten und mein Drahtgeflecht ist schnell an verschiedenen Stellen gebrochen. Von daher bin ich dann auf den Motortreiber L298 umgestiegen, welcher eine H-Brücke integriert hat und sehr günstig zu erwerben ist.
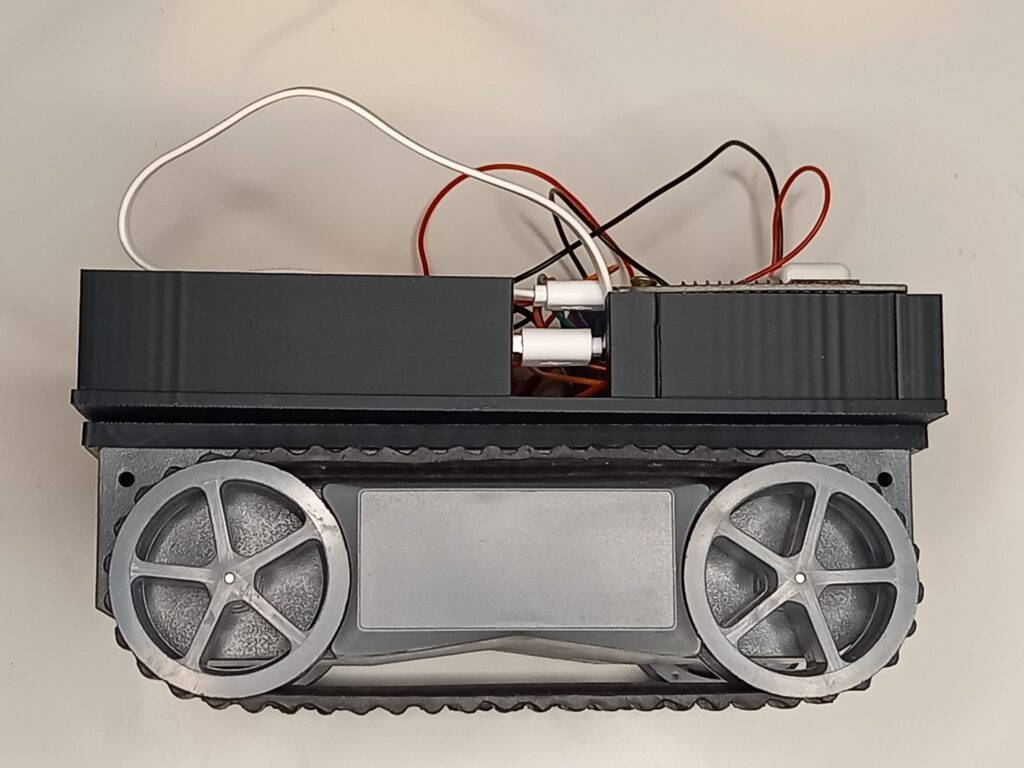
Als nächstes war die Frage, wie man ein kleines Fahrzeug lenken kann. Da ich auf komplexere Mechanik verzichten wollte habe ich mich der Einfachheit halber für ein Roboterfahrgestell entschieden. Genauer gesagt habe ich ein RP5-CH02 Fahrgestellt verwendet welches zwei integrierte 6V Motoren enthält. Die Lenkung erfolgt, indem man die eine Kette mit einer anderen Geschwindigkeit bewegt als die andere.
Für die Fernsteuerung des Fahrzeugs muss man nun noch zwei Fragen beantworten, nämlich wie man die Kabel los wird damit das Fahrzeug frei beweglich ist und wie man das Fahrzeug kontrollieren kann. Die erste Frage lässt sich relativ leicht beantworten, weil man den Raspberry Pi mit Hilfe einer Powerbank betreiben kann. Die zweite Frage ist ein wenig komplizierter. Zunächst habe ich den Raspberry WLAN fähig gemacht und dann ein Ad-Hoc-Netzwerk eingerichtet. Mit einem Handy kann man sich dann mit dem Netzwerk verbinden und das Fahrzeug über eine Html Seite steuern.
Nachdem ich das ganze zum Laufen gebracht hatte ist mir aufgefallen das es nicht sehr sinnvoll ist, den Raspberry Pi auf diese Weise zu nutzen, weil man ja auch noch viele andere Dinge mit dem Pi machen möchte. Deswegen habe ich nach einer Alternative gesucht und bin dabei auf den ESP8266 Mikrocontroller gestoßen. Dieser lässt sich mit der Arduino IDE relativ leicht programmieren. Die aktuelle Version des Roboterfahrzeugs ist mit diesem Mikrocontroller realisiert.
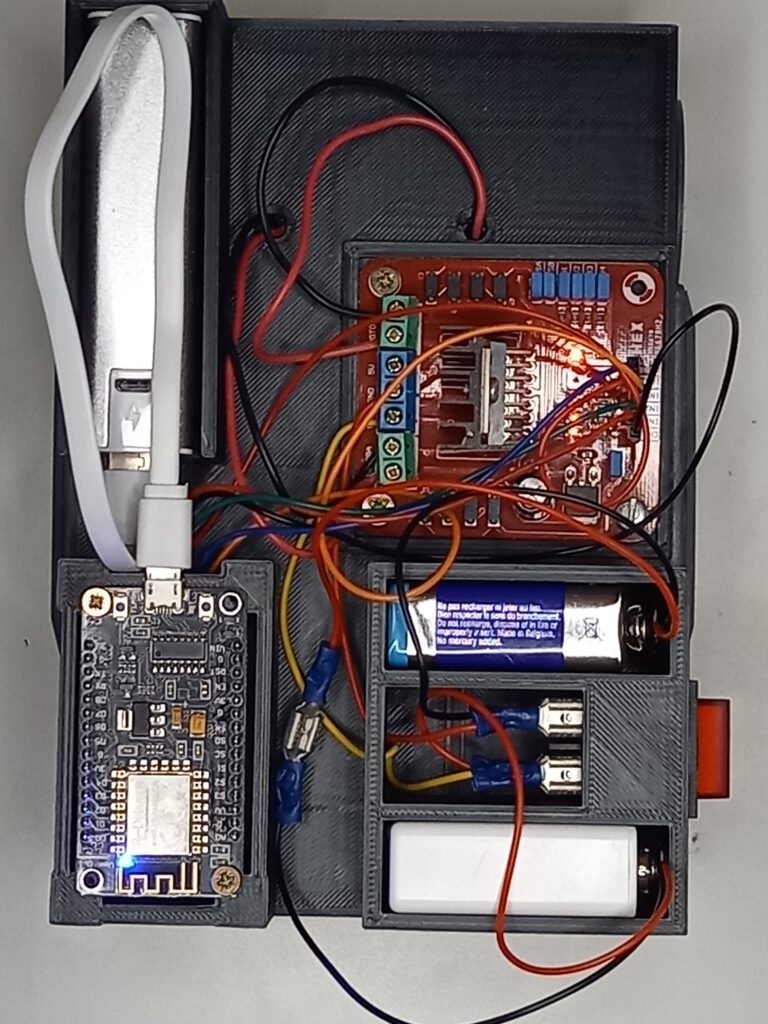
Zum Abschluss des Projekts wurde noch eine Plastikplatine und ein dazugehöriger Deckel mit einem 3D Drucker hergestellt. Auf der Platine können sowohl der Mikrokontroller, der Motortreiber sowie die Powerbank und die Batterien leicht untergebracht werden.
Als Fazit würde ich sagen dass das Projekt sehr aufwendig war, ich durch dieses aber auch viele Dinge gelernt habe die mir für zukünftig Projekte von Nutzen sein können. Was ich auf jeden Fall anders machen würde wäre, das ich nicht versuchen würde, Schaltungen selbst zu löten bzw. das ich zumindest einige Zeit darauf verwenden würde, löten zu lernen.